PIC16F88 08 Stepper Motor |
|
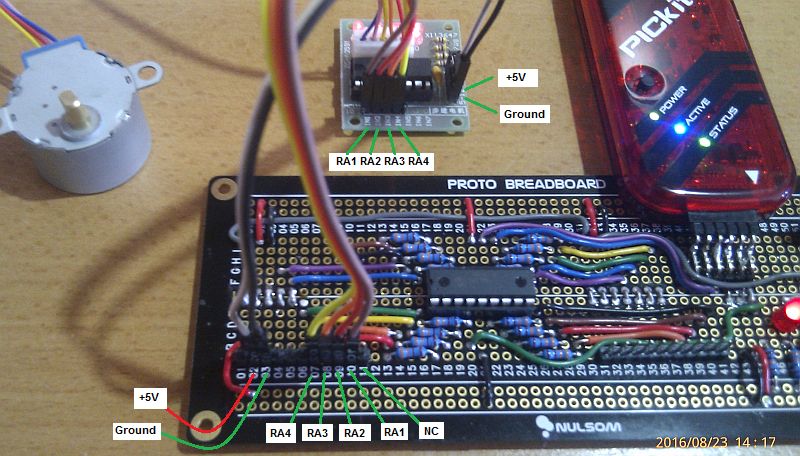
This uses a stepper motor and Darlington Driver board - 28BYJ-48. The motor is geared for slow but precise movement. It's OK to run this for short periods via the 7805 voltage regulator but it gets quite hot. For prolonged operation, a separate 5 Volt supply should be used for the motor.
; PIC16F88 Configuration Bit Settings
; CONFIG1 and CONFIG2
#include "p16F88.inc"
__CONFIG _CONFIG1, _FOSC_INTOSCIO & _WDTE_OFF & _PWRTE_OFF & _MCLRE_OFF & _BOREN_OFF & _LVP_OFF & _CPD_OFF & _WRT_OFF & _CCPMX_RB0 & _CP_OFF
__CONFIG _CONFIG2, _FCMEN_ON & _IESO_ON
RES_VECT CODE 0x0000 ; processor reset to vector address zero
GOTO START ; go to beginning of program
MAIN_PROG CODE ; let linker place main program
START: ; INITIALISATION
bsf STATUS, RP0 ; Select bank 1.
movlw b'00000000' ; Set all port pins to output / Disable ADC / Set for digital i/o
movwf ADCON1 ; Disble ADC module (Never leave this to chance)
movwf ANSEL ; Set analog i/o for digital i/o (Never leave this to chance)
movwf TRISA ; Set porta for output - RA5 is input only so this bit is ignored
movlw b'11111111' ; Set all portB pins to input / unused
movwf TRISB ; Set porta for output - RA5 is input only so this bit is ignored
movlw b'00000000' ; <<<< Set Oscillator to 31.25 kHz or
movwf OSCCON ; <<<< 128 microseconds per line of code.
CLRWDT ; Clear the Watchdog Timer and prescaler
movlw b'00000011' ; 1:8 prescaler
movwf OPTION_REG ; The prescaler settings are stored in OPTION_REG
bcf STATUS, RP0 ; Select bank 0.
STEPPER:
MOVLW 0x02 ; xxx0001x ; The control board does not have a line zero - neither does this code.
MOVWF PORTA
CALL DELAY
MOVLW 0x04 ; xxx0010x
MOVWF PORTA
CALL DELAY
MOVLW 0x08 ; xxx0100x
MOVWF PORTA
CALL DELAY
MOVLW 0x10 ; xxx1000x
MOVWF PORTA
CALL DELAY
GOTO STEPPER ; continue forever
DELAY:
bcf INTCON, TMR0IF ; Clear the TMR0IF flag
MOVLW d'220' ; Very SLOW motor movement. Increase 220 up to 256 in small steps
MOVWF TMR0 ; The motor will run faster until it stalls.
DELAY_POLL:
btfss INTCON, TMR0IF ; did TMR0 roll over yet? Is TMR0IF set?
goto DELAY_POLL ; NO - Go back and repeat the DELAY_POLL polling loop.
RETURN ; YES - Return from the subroutine
end
Contact, Copyright, Cookies and Legalities: C Neil Bauers - reviseOmatic V4 - © 2016/17
Hosted at linode.com - London
Please report website problems to Neil