
RANDOM PAGE
SITE SEARCH
LOG
IN
SIGN UP
HELP
To gain access to revision questions, please sign up and log in.
A2
Robotic Output Devices / Actuators
Movement
Actuators produce movement. The movement can result in the robot itself moving. Also the movement can turn on electrical, hydraulic or pneumatic compressed air devices used to control machinery such as fluid flow control valves. There are some interesting videos covering this area on the video links page. Interesting new materials are being developed that might be useful as robotic actuators.
Small linear movements - Solenoid
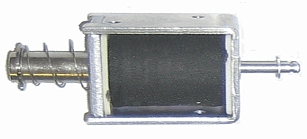
- The solenoid uses an electromagnet which is either on or off.
- The solenoid produces a small movement of a magnetic iron core when the electromagnet is on.
- They are available in tiny milliwatt versions up to big items rated up to 100 watts.
Rotation
- Stepper Motor

- The motor runs in precise steps.
- Use a microcontroller to control the position with precision.
- The position need not be measured.
- The head in an ink jet printer is moved with a stepper motor.
- Conventional Motor

- Used when higher powers are needed.
- Position can be measured with a linear Gray code scale.
- Speed can be measured with a slotted comb-like grid, counting flashes of infrared passing through the slots
Small angular movements
- Servo

- This is controlled with a stream of accurately timed pulses.
Sound
- Warning sounds
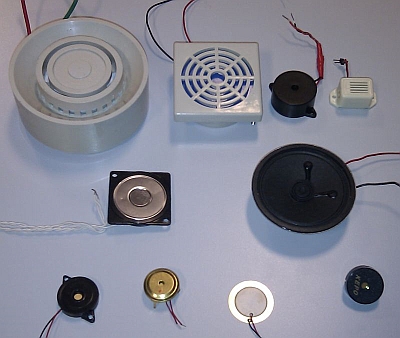
- Speech - For example horrible telephone answering robots
- "If you want to borrow money, press 1."
- "If you want to pay a bill, press 2."
- "To talk to a person, please hang up."
Light
- Indicator lights - LEDs
- Small amounts of numeric output - Seven Segment Displays

- Small mounts of text output - LED Matrix Displays
- Short or longer text messages - LCD Screens
- Graphical displays - LCD Screens
reviseOmatic V3
Contacts, ©, Cookies, Data Protection and Disclaimers
Hosted at linode.com, London