
RANDOM PAGE
SITE SEARCH
LOG
IN
SIGN UP
HELP
To gain access to revision questions, please sign up and log in.
A2
aRobotic Input Devices
- Robots use many different types of input transducers, also known as sensors.
- These are used to give the robot knowledge about its environment.
- Almost anything that can be measured electronically can be used as a robot sensor often giving the robot senses not possessed by humans.
bSight
- Robots can "see" in a variety of ways using
- light
- infrared
- ultraviolet
- ultrasound
- microwave radio signals.
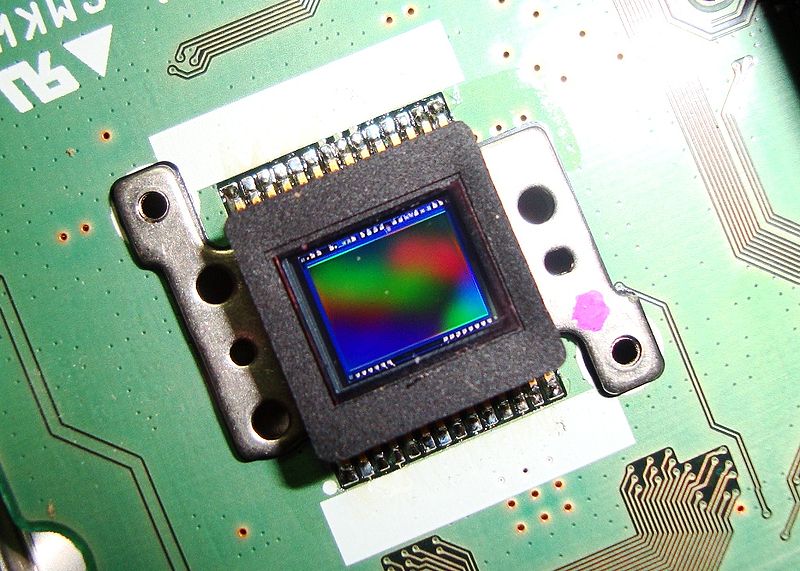
The most complex sensor is the video camera or a web-cam. Processing these images is not easy. The cameras use Charge Coupled Devices or CCD devices to convert the image into thousands or even millions of pixels. These are available for infrared, visible and ultraviolet light. The sensor output can be processed using an Artificial Neural Network or with a conventional computer.
Much simpler sensors can "see".
- A simple robot can follow a white line by measuring the output from a couple of LDRs or photodiodes.
- Infrared LEDs and photodiodes can detect objects.
- Microwave radio signals can be reflected off items (RADAR) to allow the robot to sense objects.
cSound
- A microphone converts sound into voltages proportional to the sound pressure waves.
- Sound waves are pressure waves in air.
- Humans can hear approximately 20 to 20000Hz.

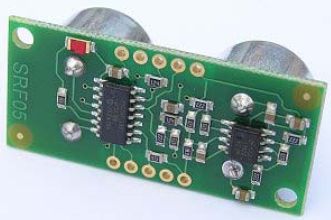
dUltrasound
- Frequencies above 20000 Hz can not be heard and are called ultrasound or ultrasonic waves.
- Ultrasonic range sensors can be used to prevent robots from bumping into unexpected obstacles.
eTouch
- The simplest touch sensor is a switch. This can be attached to a bumper or fender. If the robot hits an obstacle, the switch is depressed.
- Robots can also sense the pressure of a touch. When resistive foam is compressed, more current flows and the pressure can be measured. This sort of sensor allows a robot to pick up an egg without crushing it.
fSmell
- Do a web search for the NASA ENose. This is used to sense gas poisons in space craft.
- Similar technology is used to control brewing by smelling the beer or wine.
- Sensors designed to detect particular chemicals are used.
- Dangerous gases can be detected too (even if they have no smell for humans).
gTaste
- These sensors are similar to the smell sensors but designed to detect liquid or solid chemical traces.
hLocation
- GPS receivers can be used but these are only accurate to a few metres.
- Some robots follow cables buried in the floor. The cable carries a signal recognised by the robot.
- Robots can keep track of their relative position by measuring how far they have moved.
- Optical techniques can be used such as counting the slots in a rotating wheel or sensing a pattern printed on a reflective sheet.
- Absolute position sensing - the robot knows its actual position.
- Relative position sensing - the robot knows how far it has moved but not exactly where it is.
Straight line absolute position sensing using a Gray code scale.
Absolute rotation sensing with a circular Gray code scale.
Relative position sensing using a slotted wheel that interrupts an infrared beam.
A potentiometer can be used to measure angular position. As the robot part rotates, the potentiometer shaft also turns. The output voltage from the potentiometer is proportional to the robots angular position.
iResolution
- The size of the smallest movement that can be detected.
- In a rotating system it will be an angle such as 360o / 16.
- In a linear system, it will be a distance measured in millimetres.
- An ADC will convert the analogue signal unto 4, 8, 16, 32 ... 256 or more levels represented by a binary number. The resolution is the size in Volts of the smallest step in the output voltage.
jObstacle Sensing
- contact - sensed with a microswitch
- proximity - sensed with reflected infra-red switches
- distance - sensed with RADAR, Ultrasound range finding and even 3D Vision.
kCategorising Input Sensors
There is a long list. Here are a few examples.
| |
lActive Sensors
|
mPassive Sensors
|
nAnalogue Sensors
|
- Electret Microphone - contains an FET pre-amp
- Accelerometer - Detect the orientation of a phone
|
- Light Dependent resistor
- Thermistor
- Potentiometer
- Moving Coil Microphone
- Conducting Polymer - Changes resistance when deformed.
- Hall effect sensor - Measures magnetic fields.
- Capacitor - Capacitance changes with the input
- plate overlap might change
- plate spacing might change
- material between the plates might change
|
oDigital Sensors
|
- Optical Switch - IR-LED with photodiode and a transistor switch
- Shaft Encoders
|
- Switch - Resistance = zero or infinity.
- Microswitch
- Reed Switch
- Any kind of switch
|
pTASK: Categorise Output Sensors (as above)
reviseOmatic V3
Contacts, ©, Cookies, Data Protection and Disclaimers
Hosted at linode.com, London