PIC16F88 02 MPLAB X |
|
MPLAB X Downloads, Documentation and User Guide - This is the integrated development environment for programming microchip.com devices.
MPASM User's Guide - Find out what all those obscure mnemonics and directives mean.
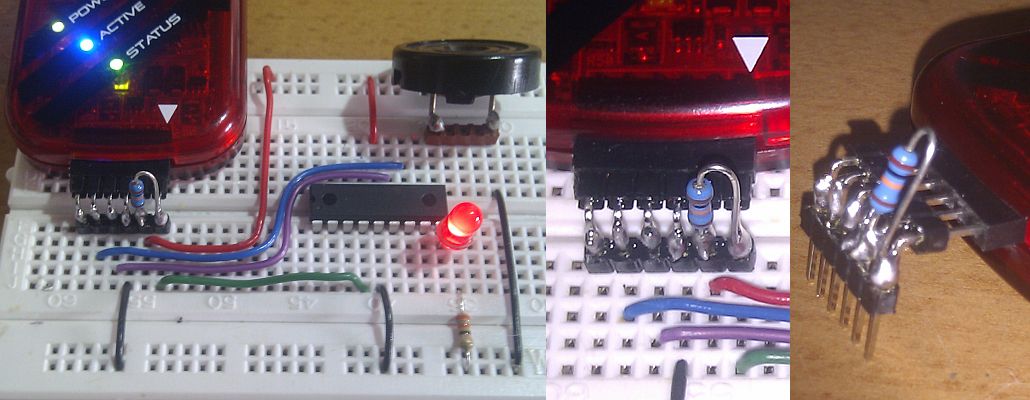
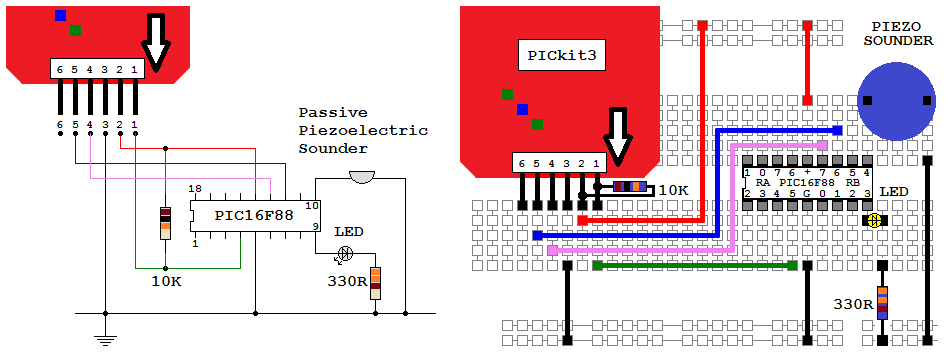
This uses the PICkit3. If you use the the shoestring PIC16F88 programmer, remember to power the board from the USB cable.
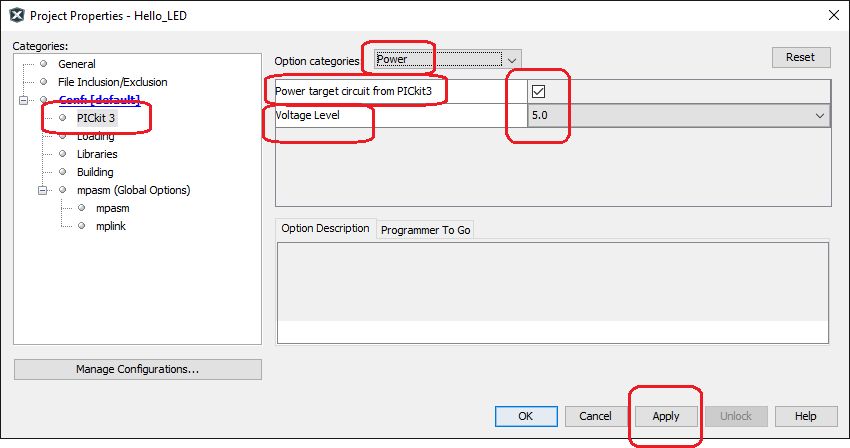
File ↠ Project Properties ↠ Set it up like this. There is a 20 mA current limit (a couple of LEDs).
This was written using MPLAB-X and the built-in wizards for setting the configuration registers. Or copy the code below and paste it in.
The program flashes the LED (too fast to see the flicker) and drives the sounder which whines at 850 Hz. To slow the program down enough to see the LED flickering, time delay code will be needed.
; PIC16F88 Configuration Bit Settings
#include "p16f88.inc"
; CONFIG1 and CONFIG2
__CONFIG _CONFIG1, _FOSC_INTOSCIO & _WDTE_OFF & _PWRTE_OFF & _MCLRE_OFF & _BOREN_ON & _LVP_OFF & _CPD_OFF & _WRT_OFF & _CCPMX_RB0 & _CP_OFF
__CONFIG _CONFIG2, _FCMEN_ON & _IESO_ON
RES_VECT CODE 0x0000 ; processor reset to vector address zero
GOTO START ; go to beginning of program
MAIN_PROG CODE ; let linker place main program
START: ; INITIALISATION
bsf STATUS, RP0 ; Select bank 1.
movlw b'00000000' ; Set all port pins to output / Disable ADC / Set for digital i/o
movwf ADCON1 ; Disble ADC module (Never leave this to chance)
movwf ANSEL ; Set analog i/o for digital i/o (Never leave this to chance)
movwf TRISA ; Set porta - RA5 is input only so this bit is ignored
movwf TRISB ; Set portb
bcf STATUS, RP0 ; Select bank 0.
MYREPEAT:
movlw 0xFF ; Toggle all the pins ON
movwf PORTA ; Move the byte to PORTA - But not RA5 which is input only
movwf PORTB ; Move the byte to PORTB
nop ; No-Operation, Needed for timing
nop ; to get a square wave output
movlw 0x00 ; Toggle all the pins OFF
movwf PORTA ; Move the byte to PORTA - But not RA5 which is input only
movwf PORTB ; Move the byte to PORTB
GOTO MYREPEAT ; Jump (two clock cycles matching the two nop lines above)
END
Here is a picoscope trace of the program output.
This program is about as simple as it's possible to get. The default, slowest clock frequency was used at 31.25 kHz which gives 7813 instruction cycles or lines of code per second.
Lines 1 to 10 will be very similar for every program you ever write. They set up the configuration bits and load a header file. Without this, you'd need to know the addresses and bit positions of all the chip registers. For example PORTA resides at address 0x05. Learning all these addresses for all the different types of chips would be near impossible.
Lines 12 to 20 set up the two ports for input or output and turn off the ADC.
Line 22 onwards does the actual work in 9 lines of code. Each line takes one instruction cycle except for the GOTO which takes two. So it takes 10 instruction cycles and 40 clock cycles to complete the loop.
These figures predict a buzzer frequency of 781 Hz. We measured 854 Hz. This is less than 10% out which is typical for the low quality RC oscillator built into the chip.
For more precise timing, an external crystal oscillator needs to be used.
Contact, Copyright, Cookies and Legalities: C Neil Bauers - reviseOmatic V4 - © 2016/17
Hosted at linode.com - London
Please report website problems to Neil