WANTED: Individual or team to take over this project. I'm in my 70's and want to put my feet up. Contact details in footer.
PIC16F88 07 Traffic Lights |
|
This example can be applied to any digital output scenario like controling a seven segment display, a LED matrix display or a stepper motor.
The only difference is the timing and the control data values.
Of course motors would need their own drivers as this chip lacks the power.
The LEDs are wired with common cathodes so a logic one is needed to light each LED.
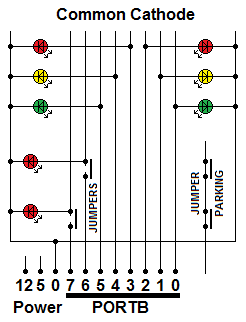
The PICkit3 programmer needs to use RA5, RB6 and RB7 for re-programming.
This LED board has been designed so these pins can be left available for the programmer.
RA5 is not used at all. During programming, the LEDs on RB6 and RB7 should be disconnected using the jumpers.
These LEDs are not needed for the traffic lights simulation so they could be left disconnected.
They were included so this board can be used to test all the output pins on either PORTB or PORTA.
Remember that RA5 is input-only so don't expect the RA5 LED to light up during the PORTA test.
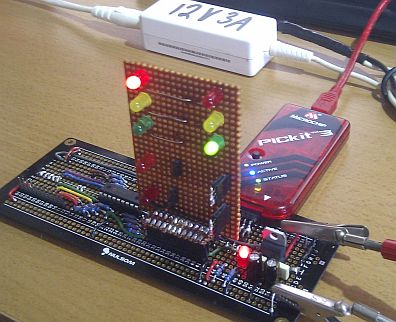
Having forgotten to disconnect the jumpers, the programmer worked OK.
It was interesting to see the LEDs on RB6 and RB7 light up during programming. This is not recommended though!
LED current limiting resistors are built into the Programmer Board and are not needed on the Traffic Lights plug-in.
Logic 1 turns on the LEDs. Lets have overlapping Red lights for safety.
| Bit | RB7 | RB6 | RB5 | RB4 | RB3 | RB2 | RB1 | RB0 | |
| 0x80 | 0x40 | 0x20 | 0x10 | 0x08 | 0x04 | 0x02 | 0x01 | ||
| Not Used | Not Used | Green | Amber | Red | Red | Amber | Green | Hex Value | |
| 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0x24 | |
| 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0x14 | |
| 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0x0C | |
| 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0x0E | |
| 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0x09 | |
| 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0x0A | |
| 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0x0C | |
| 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0x1C |
; PIC16F88 Configuration Bit Settings
; CONFIG1 and CONFIG2
#include "p16F88.inc"
__CONFIG _CONFIG1, _FOSC_INTOSCIO & _WDTE_OFF & _PWRTE_OFF & _MCLRE_OFF & _BOREN_OFF & _LVP_OFF & _CPD_OFF & _WRT_OFF & _CCPMX_RB0 & _CP_OFF
__CONFIG _CONFIG2, _FCMEN_ON & _IESO_ON
RES_VECT CODE 0x0000 ; processor reset to vector address zero
GOTO START ; go to beginning of program
MAIN_PROG CODE ; let linker place main program
START: ; INITIALISATION
bsf STATUS, RP0 ; Select bank 1.
movlw b'00000000' ; Set all port pins to output / Disable ADC / Set for digital i/o
movwf ADCON1 ; Disble ADC module (Never leave this to chance)
movwf ANSEL ; Set analog i/o for digital i/o (Never leave this to chance)
movwf TRISA ; Set porta for output - RA5 is input only so this bit is ignored
movwf TRISB ; Set portb for output
movlw b'00000000' ; <<<< Set Oscillator to 31.25 kHz or
movwf OSCCON ; <<<< 128 microseconds per line of code.
CLRWDT ; Clear the Watchdog Timer and prescaler
movlw b'00000111' ; 1:256 prescaler for a delay of: (insruction-cycle * 256-counts)*prescaler = ((1uS * 256)*256) =~ 65.5 mS
; ----0--- means the prescaler is assigned to Timer0
; -----111 means the prescaler is set to 1:256
movwf OPTION_REG ; The prescaler settings are stored in OPTION_REG
bcf STATUS, RP0 ; Select bank 0.
LIGHTS: ; 84218421
MOVLW 0x24 ; XXGARRAG
MOVWF PORTB ; 1 1
CALL DELAY
CALL DELAY ; Longer Delay
CALL DELAY
CALL DELAY
CALL DELAY
; 84218421
MOVLW 0x14 ; XXGARRAG
MOVWF PORTB ; 1 1
CALL DELAY
; 84218421
MOVLW 0x0C ; XXGARRAG
MOVWF PORTB ; 11
CALL DELAY
; 84218421
MOVLW 0x0E ; XXGARRAG
MOVWF PORTB ; 111
CALL DELAY
; 84218421
MOVLW 0x09 ; XXGARRAG
MOVWF PORTB ; 1 1
CALL DELAY
CALL DELAY ; Longer Delay
CALL DELAY
CALL DELAY
CALL DELAY
; 84218421
MOVLW 0x0A ; XXGARRAG
MOVWF PORTB ; 1 1
CALL DELAY
; 84218421
MOVLW 0x0C ; XXGARRAG
MOVWF PORTB ; 11
CALL DELAY
; 84218421
MOVLW 0x1C ; XXGARRAG
MOVWF PORTB ; 111
CALL DELAY
GOTO LIGHTS ; continue forever
DELAY:
bcf INTCON, TMR0IF ; Clear the TMR0IF flag
MOVLW d'222' ; 222 was calculated to get about 1s delay
MOVWF TMR0 ; TMR0 now counts from 222 to 256 before setting the timer flag
; 128 us * (256 - 222) * 256 =~ 1s
DELAY_POLL:
btfss INTCON, TMR0IF ; did TMR0 roll over yet? Is TMR0IF set?
goto DELAY_POLL ; NO - Go back and repeat the DELAY_POLL polling loop.
RETURN ; YES - Return from the subroutine
end
Contact, Copyright, Cookies and Legalities: C Neil Bauers - reviseOmatic V4 - © 2016 to 2025
Hosted at Akamai Cloud - London
Please report website problems to Neil