PIC16F88 0B Digital I/O |
|
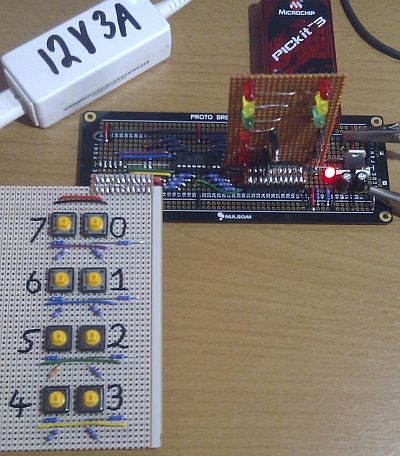
The program polls PORTA and copies the input data to PORTB.
All the output LEDs are off untill a push button is pressed.
The polling is triggered by a Timer0 interrupt.
It's interesting to run this code with the switch board unplugged.
The floating inputs pick up random data from the electrical noise in the environment so the output LEDs flash unpredictably.
Never leave floating inputs!
;*******************************************************************************
; PIC16F88 Configuration Bit Settings
;*******************************************************************************
#include "p16F88.inc"
; CONFIG1
__CONFIG _CONFIG1, _FOSC_INTOSCIO & _WDTE_OFF & _PWRTE_OFF & _MCLRE_OFF & _BOREN_OFF & _LVP_OFF & _CPD_OFF & _WRT_OFF & _CCPMX_RB0 & _CP_OFF
; CONFIG2
__CONFIG _CONFIG2, _FCMEN_ON & _IESO_ON
;*******************************************************************************
; Uninitialised Data - Reserve bytes here ...
;*******************************************************************************
UDATA
PortByte RES 1 ; reserves 1 byte - OK with simulator debug
;*******************************************************************************
; RESET VECTOR
;*******************************************************************************
RES_VECT CODE 0x0000 ; processor reset vector
GOTO CODE_INIT ; beginning of program, initialise stuff
;*******************************************************************************
; INTERRUPT HANDLING
;*******************************************************************************
ISR CODE 0x0004 ; The interrupt vector location is always 0x0004
GOTO ISR_HANDLER ; Jump to the Interrupt handling code
;*******************************************************************************
; MAIN PROGRAM - CODE INITIALISATION
;*******************************************************************************
MAIN_PROG CODE ; let linker place main program
CODE_INIT: ; INITIALISATION
CALL PORT_INIT ; Set up I/O Port Directions
CALL TIMER_INIT ; Set up Timer0
CALL TIMER_START ; Start Timer0
GOTO IDLE_LOOP ; Jump to the Infinite Idle Loop
;*******************************************************************************
; INTERRUPT SUBROUTINE
; This ought to save and restore the context
; It's not secessary in this simple example
;*******************************************************************************
ISR_HANDLER:
BCF STATUS, RP0 ; Select memory bank 0.
MOVF PORTA, 0 ; Copy PORTA to WREG
MOVWF PortByte
CALL SET_PORTB
CALL TIMER_START ; Re-Start Timer0
RETFIE ; Return from interrupt
;*******************************************************************************
; INITIALISE PORTS
;*******************************************************************************
PORT_INIT: ; Use PIC16F88 Data Sheet method
BANKSEL PORTA ; select bank of PORTA (Bank 1)
CLRF PORTA ; Initialize PORTA by
; clearing output
; data latches
BANKSEL ANSEL ; Select Bank of ANSEL
MOVLW 0x00 ; Configure all pins
MOVWF ANSEL ; as digital inputs
MOVLW 0xFF ; Value used to initialize data direction (8 Inputs)
MOVWF TRISA ; Set RA<7:0> as inputs
MOVLW 0x00 ; Value used to initialize data direction (8 Outputs)
MOVWF TRISB ; Set RA<7:0> as out6puts
RETURN
;*******************************************************************************
; INITIALISE TIMER0
;*******************************************************************************
TIMER_INIT:
BSF STATUS, RP0 ; Select memory bank 1.
CLRWDT ; Clear the Watchdog Timer and prescaler
MOVLW b'00000010' ; 1:8 Prescaling
MOVWF OPTION_REG ; The prescaler settings are stored in OPTION_REG
BSF INTCON, GIE ; Turn on interupts globally
BSF INTCON, TMR0IE ; Turn on Timer0 interupts
RETURN
;*******************************************************************************
; START TIMER
;*******************************************************************************
TIMER_START:
BCF STATUS, RP0 ; Select memory bank 0.
BCF INTCON, TMR0IF ; Clear the TMR0IF flag
MOVLW d'250' ; TMR0 counts from 250 to 256
MOVWF TMR0 ; 250 copied into TMR0
RETURN
;*******************************************************************************
; Send data to the ports
;*******************************************************************************
SET_PORTB:
BCF STATUS, RP0 ; Select memory bank 0.
MOVF PortByte, 0 ; Copy MyCount to WREG
MOVWF PORTB ; Copy WREG to PORTB
RETURN
;*******************************************************************************
; The Idle Loop
; MS Windows has an "idle process" which waits for the user to do something.
;*******************************************************************************
IDLE_LOOP:
NOP
NOP ; NOPs make the code execution obvious in the simulator
NOP ; Leave them out in real life
NOP
GOTO IDLE_LOOP
END
Contact, Copyright, Cookies and Legalities: C Neil Bauers - reviseOmatic V4 - © 2016/17
Hosted at linode.com - London
Please report website problems to Neil